Firmware 0.76
 Page in
Page in  Seite in
Seite in Date de publication: 29.10.2009
Licence: LICENSE.TXT
Lien sur le forum: http://forum.mikrokopter.de/topic-12366.html
Téléchargement:
Version spécifique dédiée au récepteur ACT-S3D avec sortie sommée (tous les canaux sommés dans un seul signal):
10.11.2009 Patch g: Flight-Ctrl V0.76g pour S3D
Video
Inhaltsverzeichnis
- Firmware 0.76
- Servoausgänge 1-5
- Servo Ansteuerung
- Schaltausgänge 1+2
- Ausgang 1
- Patch-Übersicht
Neue alternative Höhenregelung "VARIO-Höhenregler"

Umschaltbare Bedien- und Regelarten:
- "Height limitation control" entweder mit Schalter, festem Wert oder Poti (wie bisher)
- '"Vario altitude control" als zusätzliches neues Bedienkonzept:
Ein über den Luftdruck kontrolliertes Steigen & Sinken
- Akustisches Feedback für zusätzliche Sicherheit (schaltbar)
- Höhenregelung funktioniert in "jeder Höhe" und muss nicht durch Ein- und Ausschalten in gewünschter Sollhöhe erneuert werden
- Im Schweben kann die 'Vario altitude Control' gefahrlos ein- und ausgeschaltet werden
- Regelung über den Luftdruck in 5 fach höherer Auflösung, bis auf 1 cm
- Verrechnung des Lagewinkels (erhöht den Gaswert im Marschflug und verhindert so ein Durchsacken)
- Einstellbarer Dämpfungs-Einfluss von ACC-Z (wie gehabt)
- Berücksichtigung der Akkuspannung (Entladekurve)
- Optionale Dämpfung durch GPS-Z (Höhengeschwindigkeit)
- Schwebegas wird exakt automatisch eingelernt und ermöglicht so ein bessere Regelung um die Sollhöhe
- Hovergas-Variation begrenzt das eingelernte Schwebegases um +/- %
- Bugfix: Messbereichsumschaltung des Luftdrucksensors konnte zuvor springen
![]() Beachten:
Beachten:
Diesen Betriebsmodus erst verwenden, wenn man sicher ist, dass der Luftdrucksensor einwandfrei nach der "Height limitation" - Methode funktioniert. Ansonsten kann das zu unerwarteten Reaktionen des MikroKopters führen (wie heftiges Steigen oder Sinken)!
- Man kann in dem Mode nicht mit dem Gasstick das Gas rausnehmen. Ein funktionierender Sensorwert ist hier wirklich wichtig!
- Wenn die Höhenregelung spinnen sollte (z.B. bei einem Wackelkontakt am Luftdrucksensor), muss man sie mit dem Schalter abschalten können.
MikroKopter mit niedrigem Landegestell sollte man mit ausgeschaltetem Höhenregler starten und landen, weil der Bodeneffekt sonst sehr stark sein kann (Hüpfen).
- Die Elektronik sollte gegen den Propeller(luft)druck geschützt sein, z.B. mit einer Haube. Damit lassen sich die besten Ergebnisse bezüglich des Höhenreglers erzielen.
![]() weitere Details siehe MK-Parameter/Altitude...
weitere Details siehe MK-Parameter/Altitude...
Kamera: Nick- und Rollausgleich
- Unterstützung der Servos für Roll- und Nickkompensation bei der FC ME V2.0
- bei der FC V1.3 und früher ist hardwarebedingt nur der Nickausgleich möglich
Unterstützung der Servos an der NaviCtrl für Roll- und Nickkompensation
![]() Die Servos werden erst nach dem Kalibrieren des Mikrokopter angesteuert! Ausnahme: Wenn keine BL-Ctrl gefunden wurden, werden die Servo sofort aktiviert (z.B. für Stand-alone Anwendungen der FC)
Die Servos werden erst nach dem Kalibrieren des Mikrokopter angesteuert! Ausnahme: Wenn keine BL-Ctrl gefunden wurden, werden die Servo sofort aktiviert (z.B. für Stand-alone Anwendungen der FC)
Include: Textmarkierung "^= Camera =$" nicht gefunden!
Diese Seite als PDF-Dokument? Einfach auf das Symbol klicken und etwas warten... ---> |
 |
|

Kamera (Gimbal) + Servoausgänge |
|
|
|
|


















Inhaltsverzeichnis
Servoausgänge 1-5

Die folgenden Einstellungen betreffen die Servoausgänge 1 bis 5 der FlightCtrl.
Servo Ausgang 1 => Servo Ansteuerung Nick - (Kamera Gimbal Nick)
Servo Ausgang 2 => Servo Ansteuerung Roll - (Kamera Gimbal Roll)
Servo Ausgang 3 => Servo 3
Servo Ausgang 4 => Servo 4
Servo Ausgang 5 => Servo 5
Servo Ausgang 6 => FlightCtrl V3.0 - noch nicht belegt
!!! Die Servoausgänge sind erst nach Kalibrierung/Aktivierung des Kopters in Funktion !!!
Aktivierung: Gas rauf + Gier links
Servo Ansteuerung

Die Servo Ausgänge 1 + 2 sind für die Ansteuerung einer Kamerahalterung
(Servo-Gimbal oder Brushless-Gimbal) vorgesehen.
Diese können hier speziell eingestellt werden.
Einstellungen zum Gieren

- Gier-P und Gier-I sind jetzt getrennt konfigurierbar, um das Gierverhalten individueller einzustellen
 mehr Details unter MK-Parameter/Gyro...
mehr Details unter MK-Parameter/Gyro...
LED-Blinkmuster
Include: Textmarkierung "^= Output =$" nicht gefunden!
Diese Seite als PDF-Dokument? Einfach auf das Symbol klicken und etwas warten... ---> |
|
|
Ausgänge |
|
|
|
|



Inhaltsverzeichnis
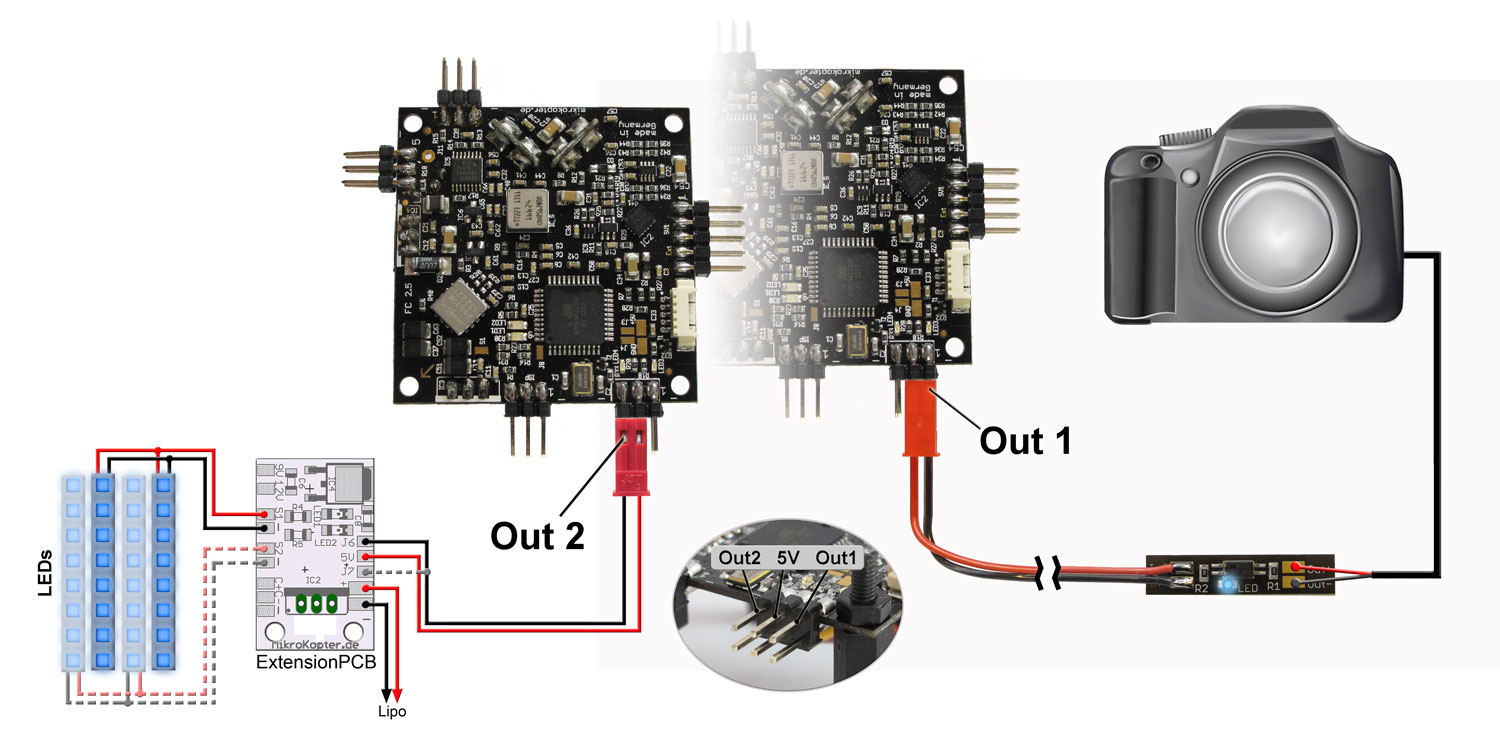
Schaltausgänge 1+2

Anschlüsse FlightCtrl V3.0
(Anschlüsse FlightCtrl V2.5)
{kind=link}
Die folgenden Einstellungen betreffen die Schaltausgänge 1+2 der FlightCtrl.
Out 1 => (Schalt-)Ausgang 1
Out 2 => (Schalt-)Ausgang 2
Am Schaltausgang liegen +5V (max 100mA) dauerhaft an. Geschaltet wird jeweils GND.
Sollen Verbraucher mit größerer Stromaufnahme hierüber geschaltet werden (z.B. LEDs),
muss eine externe Schaltung (z.B. per ExtensionPCB) genutzt werden.
Soll bei einem Wegpunkteflug automatisch über den Schaltausgang 1 ausgelöst werden, muss die WP-Automatik aktiviert werden. Infos hierzu findet man hier: Link
Ausgang 1
Hier kann der (Schalt-)Ausgang 1 (Out1) eingestellt werden.
Dieser Ausgang wird i.d.R. zum Auslösen einer Fotokamera genutzt.
Automatische Zellenerkennung

Unterspannungswarnung für einzelne Zellen von 3.2V auf 3.3V angehoben (9.6V --> 9.9V für 3S)
- Zellenerkennung nun auch beim Speichern der Settings
- Minimale Unterspannungswarnung ist unabhängig von der Einstellung auf 9.3V begrenzt!
Empfänger
- RC-Routine: Empfangsausfall wird sicherer erkannt
es wird überprüft, ob sich im Flug die Anzahl der Kanäle ändert -> das dürfte im fehlerfreien Betrieb nie passieren
- in den ersten 500ms wird bei Empfangsstörung ein altes Datenpaket (das vorletzte) verwendet, anstatt das letzte
- es wird eine Mindestzeit (ca. 1 sek) auf "fehlerhaften Empfang" geschaltet
- Jeti-Empfänger funktionieren, wenn man sie auf 20ms einstellt (mit Jetibox)
beide Varianten (alte & neue) der RC-Routine im KopterTool wählbar
Zähler Flugzeit

Es gibt jetzt zwei Zähler, die die Flugminuten sammeln.
Einen kann man im virtuellen Menü löschen. (So ähnlich wie die beiden Kilometerzähler beim Auto)
Waypoints im MK-Tool
Es gibt jetzt einen Editor für Waypoints:

Man kann Waypoints hinzufügen (manuell oder per Maus), in der Grafik verschieben, löschen oder die Reihenfolge ändern.
Erst erstellt man eine WP-Liste auf dem PC und muss dann diese zum MikroKopter übertragen. Der GPS-Schalter sollte dabei auf ComingHome stehen.
Die Bedienung sollte selbsterklärend sein.
Hier ein paar Hinweise:
- Hinzufügen von Waypoints:
- Editor im Menü öffnen
- Linksklick zum Platzieren des roten Merkers in der Map
- auf '+' im WP-Editor klicken
oder schneller:
- einfach mit Rechtsklick in der Map neue WPs hinzufügen
Hinweis: Beim Einfügen werden immer der Radius und die DelayTime im WP-Editor genommen.
- Man kann WPs manuell ändern, mit der Maus in die Tabellenzelle klicken und 'F2' drücken (Eingabe mit ENTER beenden)
- Gesetzte WPs (orange) kann man mit der Maus (Linksklick) später auch noch verschieben oder mit dem WP-Editor die Reihenfolge ändern.
- Der aktuelle WP aus dem Editor wird in der Map markiert.
- Die Listen kann man in eine Datei speichern/laden.
- zur Erinnerung: Wie man z.B. aus OpenStreetMap sich Maps für das MK-Tool erstellt: Firmware-0.74d
Löschen der Waypoints mit dem Sender
Das Löschen der Waypointliste ist jetzt auch mit dem Sender möglich. Ein Schalten von CH -> FREE -> CH löscht die Liste und der MK kommt zur Homeposition zurück
OSD-Ausgabe im MK-Tool
- es gibt ein paar Detailänderung in der Anzeige.
- der aktuelle Gaswert (Thrust) und der Setpoint der Höhenregelung hinzugefügt.
- je einen Kompass für Richtung mit Entfernung zum nächsten Waypoint (türkis) und Richtung zur Homeposition (grün):

- automatisch Umschaltung der Spannungsanzeige bei 3s bzw. 4s
- akustisches Signal bei Erreichen von Waypoints
- akustisches Signal bei Unterspannung
Sonstige Neuerungen
FlightCtrl: Einstellung im Beginner-Setting
hier ist jetzt die DrehratenBegrenzung (rotation rate limiter) deaktiviert. Wem das zu 'sportlich' ist, kann die wieder einschalten
MK-Tool:Settings-Dialog

Im Setting-Dialog des MK-Tools gibt es jetzt einen Hilfeknopf, der direkt auf die entsprechende Wikiseite verlinkt.
Hier die Beschreibungen im Wiki: MK-Parameter
- Parameter, die aufgrund der Konfiguration keine Funktion haben, werden deaktiviert bzw. grau dargestellt
- Kompass wird zwangsweise aktiviert, wenn man GPS aktiviert
- Dialogseiten, die aufgrund der Konfigurationseinstellungen keine Funktion haben, werden wegen der Übersichtlichkeit ausgeblendet.
- Einige Einstellungen sind nur erreichbar, wenn beim Öffnen der Settings die ALT-Taste gehalten wird (z.B. das Mixer-Setup)
MK-Tool:Kompatibilitätsmodus für serielle Schnittstelle
- Kompatibilitätsmodus für serielle Geräte (einige BT-Dongle, USB-RS232-Wandler) eingefügt, die zuvor dauerhaft beim Start einen Comport Fehler angezeigt haben.
Die EXE-Datei muss dazu mit dem Parameter /comp_io gestartet werden.
- Bei Verwendung des MKUSB ist dies i.d.R. nicht erforderlich.
NaviCtrl:Windkorrektur
- erheblich verbesserte Windkorrektur beim Anfliegen von Waypoints
- Bugfix beim Schreiben auf nicht bereite SD-Karte behoben
FlightCtrl: Motortest
- Bugfix: Motor Nr. 8 macht jetzt wieder einen Selbsttest
MK3Mag:Protokoll
- Protokoll wurde überarbeitet, um Datenbusfehler besser identifizieren zu können
Weitere Tools
Dubwise
DUBwise ab Version 0.56e
QMK Groundstation
MissionCockpit
Allgemeine Hinweise zum Flashen der Firmware
Grundsätzlich ist die Reihenfolge egal. Empfohlen wird folgende Reihenfolge mit dem neusten MK-Tool:
NaviCtrl
- MK3Mag
FlightCtrl
Evtl. Meldungen bzgl. Inkompatibilitäten vom MK-Tool oder den Platinen können während des Updatevorgangs ignoriert werden.
Am Ende alles einmal aus- und wieder einschalten. (am besten befindet man sich dabei im Terminalfenster, dmait man gleich die Startausgaben der NaviCtrl (und evtl. Fehler) sieht)
Im Idealfall ist damit das Update beendet.
Es ist etwas schief gegangen? MK-Tool zeigt nun immer "Timeout" beim Updateversuch an?
Lösung: Direkt mit der Platine verbinden und während der 'Connect'-Meldung im MK-Tool, die Platine aus- und wieder einschalten. Dies startet immer den Bootloader, welcher dann das Update durchführt.
Hinweis zu Problemen mit Bluetooth
Sollten Probleme bei dem Versuch, den Mikrokopter mittels Bluetooth mit dem MK-Tool zu verbinden, auftreten, ist ab der Version 1.66b ein sogenannter Kompatibilitätsmodus eingebaut. Er kann über den optionalen Parameter /comp_io gestartet werden. Dieser Modus ist nur für solche Anwender gedacht, die zuvor dauerhaft einen Comportfehler beim Start des MK-Tool angezeigt bekommen haben. Bei Verwendung des MKUSB ist dies nicht erforderlich. Bei aktiviertem Kompatibilitätsmodus ist ein Update per Wi.232 nicht möglich.
Zum Aktivieren des Kompatibilitätsmodus, mit der rechten Maustaste Eigenschaften des Desktopicons des MK-Tools auswählen und bei Ziel hinter der Mikrokopter-Tool.exe nach einem Leerzeichen /comp_io einfügen.
http://forum.mikrokopter.de/topic-post163742.html#post163742
http://forum.mikrokopter.de/topic-12410.html
Patch-Übersicht
FlightCtrl V0.76g
Änderung: 9,3V Untergrenze entfernt
- Bugfix: Gaswert ging auf 0 bei Vollausschlag (nur bei 4s-Akku)